
Przegląd
Żuraw mostowy, powszechnie znany jako „napędowy”, jest rodzajem maszyny dźwigowej szeroko stosowanej w przedsiębiorstwach przemysłowych i górniczych, jego mechanizm operacyjny składa się z trzech zasadniczo niezależnych układów napędowych, układu napędowego samochodu, układu napędowego haka, falownika K-DRIVE do powyższe trzy systemy jazdy zostały pomyślnie zreformowane, poniżej opisano głównie proces transformacji systemu jazdy przed i po chodzeniu.

Schemat Zalety
- Sterowanie wektorem prądu w otwartej pętli zorientowanej na pole, całkowicie odsprzężone zmienne silnika, duży moment obrotowy przy niskiej częstotliwości, szybka reakcja itp.;
- KD600 wykorzystuje tryb sterowania wektorowego w otwartej pętli PG i wektoryzowany tryb V/F oraz wzmacnia konfigurację poziomu mocy pierwszego biegu;
- Zakres częstotliwości: ustawienie segmentu 0,5–600 Hz, płynna regulacja ciągła;
- Zakres napięcia roboczego: 380 V ± 20%, a napięcie magistrali natychmiast spada do 360 V DC, co zapewnia bezproblemową pracę;
- Przeciążalność: 150% prądu znamionowego, dopuszczalna 1 minuta; 200% prądu znamionowego, dozwolone 1 s;
- Charakterystyka momentu obrotowego: moment rozruchowy większy niż 2-krotność momentu znamionowego; Moment obrotowy o niskiej częstotliwości, większy niż 1,6-krotność momentu znamionowego przy 1 Hz; Moment hamowania jest większy niż moment znamionowy.
Charakterystyka robocza
- Mechanizm podnoszący dźwigu charakteryzuje się dużym momentem rozruchowym, który zwykle przekracza 150% momentu znamionowego. Jeżeli uwzględni się przeciążenie i inne czynniki, podczas procesu rozruchu i przyspieszania należy zapewnić co najmniej 200% znamionowego momentu obrotowego;
- Kiedy mechanizm podnoszący porusza się w dół, silnik będzie w stanie wytwarzania energii regeneracyjnej i musi hamować przy zużyciu energii lub przekazywać informację zwrotną z regeneracją do sieci;
- Obciążenie mechanizmu podnoszącego zmienia się drastycznie, gdy podnoszony przedmiot odrywa się od ziemi lub dotyka ziemi, a przetwornica częstotliwości powinna być w stanie płynnie kontrolować obciążenie udarowe;
- Ponieważ prędkość jazdy przedniego i tylnego mechanizmu jezdnego żurawia nie jest duża w fazie projektowania mechanicznego, konwerter może zostać wykorzystany do zapewnienia odpowiedniej nadmiernej prędkości obrotowej w celu poprawy wydajności pracy.
Prosty schemat połączeń
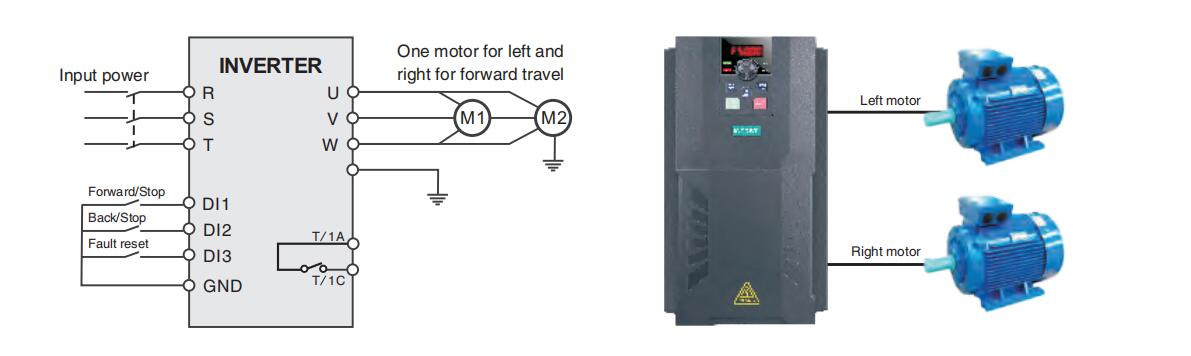
Ustawianie parametrówng i opis(parametry jazdy lewego i prawego silnika)
| Parametr | Wyjaśnić | Ustawianie parametrów | Wyjaśnić |
| P0-00=0 | Kontrola VF | P5-00=1 | do przodu |
| P0-04=1 | Zewnętrzny terminal start-stop | P5-01=2 | przeprowadzić później |
| P0-06=1 | Cyfrowe ustawienie częstotliwości | P6-00=2 | Wyjście błędu przekaźnika 1 |
| P0-14=60,00 | Maksymalna częstotliwość | P4-01 = 1,6 kW | Podłączone zasilanie silnika |
| P0-16=60,00 | Górna częstotliwość graniczna | P4-02=380V | Napięcie znamionowe silnika |
| P0-11=60,00 | Częstotliwość ustawienia cyfrowego | P4-04=3,3A | Prąd znamionowy silnika |
| P0-23=3,0 s | Czas przyspieszania | P4-05=50 Hz | Częstotliwość znamionowa silnika |
| P0-24=2,0 s | Czas hamowania | P4-06=960R/min | Prędkość znamionowa silnika |
| Uwaga: Kiedy jedna przetwornica częstotliwości jest używana z dwoma silnikami, zdecydowanie zaleca się zainstalowanie odpowiedniego przekaźnika termicznego z przodu każdego silnika, aby chronić każdy silnik. | |||
Analiza efektu działania
Przetwornica częstotliwości serii KD600 przeprowadziła transformację konwersji częstotliwości w systemie podróżującym, a efekt transformacji jest stosunkowo idealny, co widać głównie w:
- Realizowany jest miękki start i miękki stop podczas uruchamiania, co zmniejsza wpływ na sieć energetyczną;
- Po użyciu przetwornicy częstotliwości rezygnuje się z oryginalnego stycznika zmiany biegów i rezystora regulującego prędkość, co nie tylko oszczędza koszty konserwacji, ale także skraca czas przestojów na konserwację, zwiększając w ten sposób moc wyjściową;
- Kiedy główny hak pracuje z częstotliwością 5 Hz ~ 30 Hz, efekt oszczędzania energii jest bardzo oczywisty;
- Przetwornica częstotliwości służy do sterowania ruchem przednim i tylnym, a seria mechanizmów jezdnych lewego i prawego może realizować pracę nad częstotliwością. Przy założeniu zapewnienia bezpieczeństwa znacznie poprawia się wydajność pracy, a także zmniejsza się obciążenie konserwacyjne sprzętu podróżnego spowodowane częstą wymianą styczników prądu przemiennego.
Uwagi końcowe
Przetwornica częstotliwości służy do sterowania serią mechanizmów chodzenia do przodu i do tyłu oraz do chodzenia po lewej i prawej stronie, które mogą realizować prace związane z przetaktowywaniem, znacznie poprawiać wydajność pracy przy założeniu zapewnienia bezpieczeństwa, a także zmniejszać obciążenie konserwacyjne sprzętu napędowego ze względu na częsta wymiana styczników prądu przemiennego.
Strona aplikacji

Czas publikacji: 17 listopada 2023 r